


The California Near Space project, with the help of several engineers including John Malsbury, Johnathan Corgan, and Ian Kluft, is developing an open source payload design. The objective of this design is to enable new balloon developers with an end-to-end framework with the following capabilities:
- Global Position and Status Reporting with Iridium Communications
- Two-Way Communications, with legacy support for APRS transmitters
- Support for a variety of sensors – GPS, temperature, preasure, battery-sense and more
The long term goal of this project is to make it easy for people to get up and running quickly if they are beginners, or customize both the hardware and software to meet the needs of their mission if the are intermediate of advanced ballooners. With this, we hope to open the doors for more people to experiment with high-altitude balloons in a meaningful and novel way.
Initial Progress
We assembled an initial prototype and have functional software that provides basic payload functionality. On the payload side, we decided to use Arduino for its ease-of-use and ubiquity. The Arduino interfaces to a few sensors, including a MAX7Q GPS, a couple of temperature sensors, and of course the Iridium modem. Over time, we hope to add support for a long list of sensors and a variety of embedded targets – both larger (ARM/Linux based) and smaller (for low-power/light-weight missions). For now though, this is a happy medium to get everyone off the ground (pun intended).
On the ground side, a Python script interfaces to an email server through SMTP and IMAP. This is how we exchange messages between our application layer (where we product commands and process incoming data), and the payload. This Python application should be fairly easy to modify, if your mission needs . Over time we will post tutorials on how to a modify this ground station software, and the payload software to your liking. In essence, this is a GUI or command-line application that will allow you to control your balloon from anywhere in the world.
We have tagged an initial release of the software (admittedly, without much documentation). You can find the code here:
https://github.com/jmalsbury/
Also, here is a picture of the prototype:
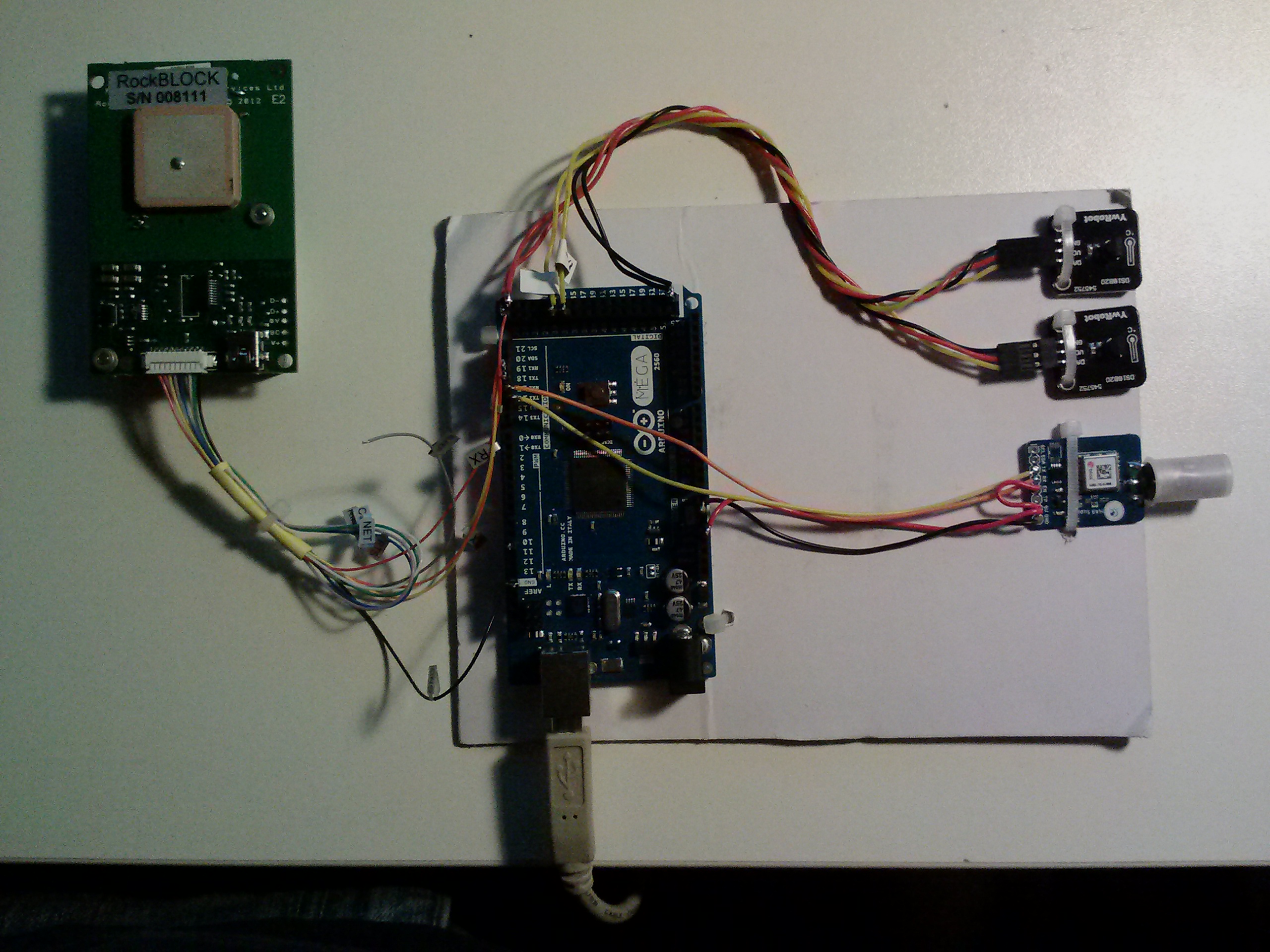
We plan to get everything packed up and experiment with some launches in the coming months.
More Information, Feature Requests, and Volunteers
If you are interested in helping out with this project, submitting feature requests, or have any general questions, please contact John Malsbury, jmalsbury.personal@gmail.com.
